在科幻文学的历史长河中,1942年是一个值得铭记的年份。这一年,艾萨克·阿西莫夫通过短篇小说《转圈圈》首次提出了“机器人三定律”,这一理论框架后来被誉为现代人工智能技术的理论基石。尽管阿西莫夫或许未曾完全预见,但八十年后的今天,人工智能技术已经深度渗透到人类生活的方方面面,甚至在某些方面超越了他的科幻想象。
2024年,人工智能技术领域迎来了一系列创新与突破,从AI视频生成模型Sora到GPT-4o等生成式人工智能新技术的问世,让人们真切感受到了“未来已来”的震撼。特别是在交通智能化领域,大模型、端到端、世界模型、车路云等技术应用成为了革命性的存在,不仅极大地提升了驾驶体验,还为城市交通的安全性、效率和可持续性开辟了新的可能。
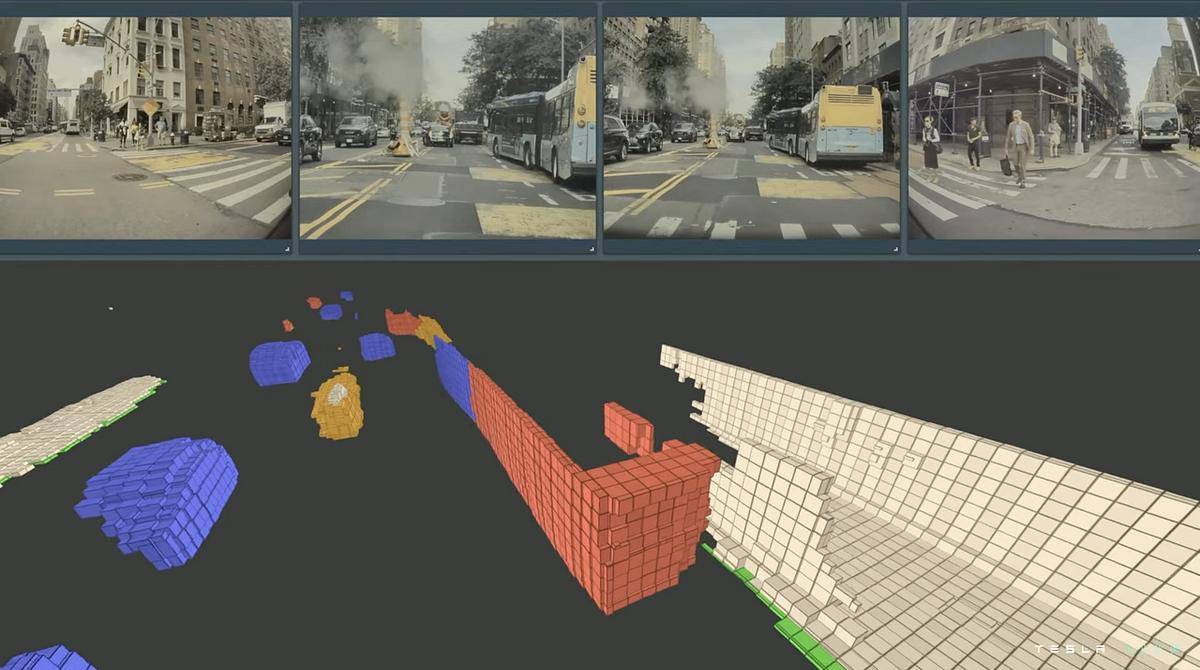
在自动驾驶领域,BEV(鸟瞰图)网络、OCC(占用网络)以及无图NOA等概念逐渐成为了行业热词。BEV网络通过矢量化的鸟瞰视角检测白名单障碍物,而OCC则通过体素化的占用网络预测3D空间的占位情况,实现对通用障碍物的感知。然而,这些技术也面临着各自的局限性。BEV网络的感知上限大致在能检测到1000多种物体,而OCC算法则受限于算力和实时性,难以检测微小物体。复杂语义如天气、光照、雨雾等,也是当前BEV+OCC组合难以解决的问题。
端到端方案的兴起,为自动驾驶领域带来了新的变革。相较于传统的分模块自动驾驶方案,端到端方案主要通过数据驱动来优化模型性能,并减少了信息损失。然而,数据正成为端到端方案发展的最大瓶颈。业界对于训练一个完美的自动驾驶模型所需的数据量并没有统一标准,但特斯拉的训练数据规模已经高达近3000万个视频片段,训练图片数量更是达到了惊人的220亿张。端到端方案的引入还增加了庞大的数据标注需求,这在一定程度上阻碍了其进一步发展。
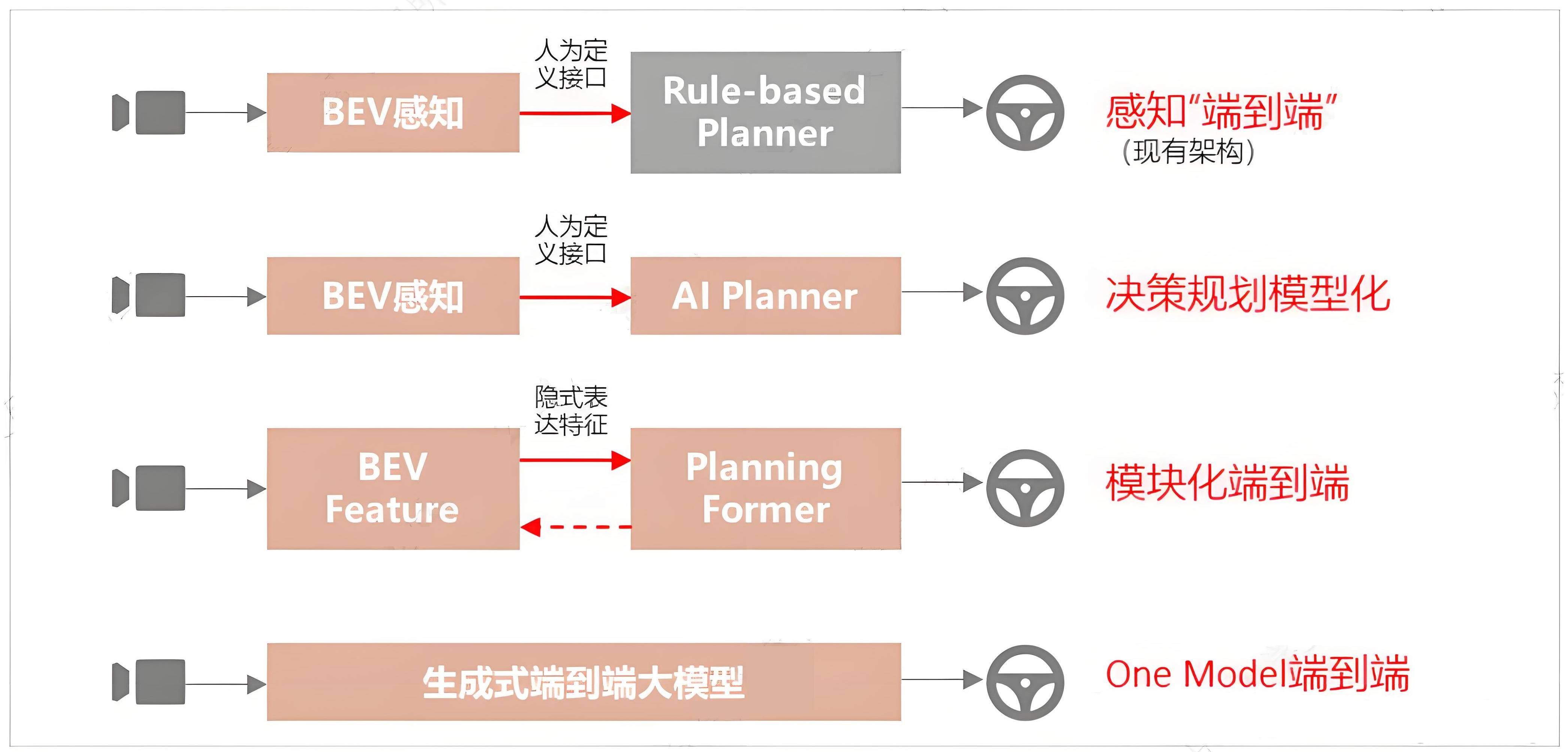
在这一背景下,世界模型的出现为自动驾驶领域带来了新的曙光。世界模型具备的超强理解能力使得视觉语言模型、大语言模型等可以建立对当下场景的整体认知,实现从感知到认知的跃迁。与基于判别式AI的物体识别不同,生成式AI的意图理解和长时序理解能力使其可以更加贴近人类驾驶的知识逻辑。世界模型不仅解决了传统端到端模型训练需要精确标注海量视频数据的难题,还通过模拟和预测未来情景,帮助自主系统做出更安全、更高效的驾驶决策。
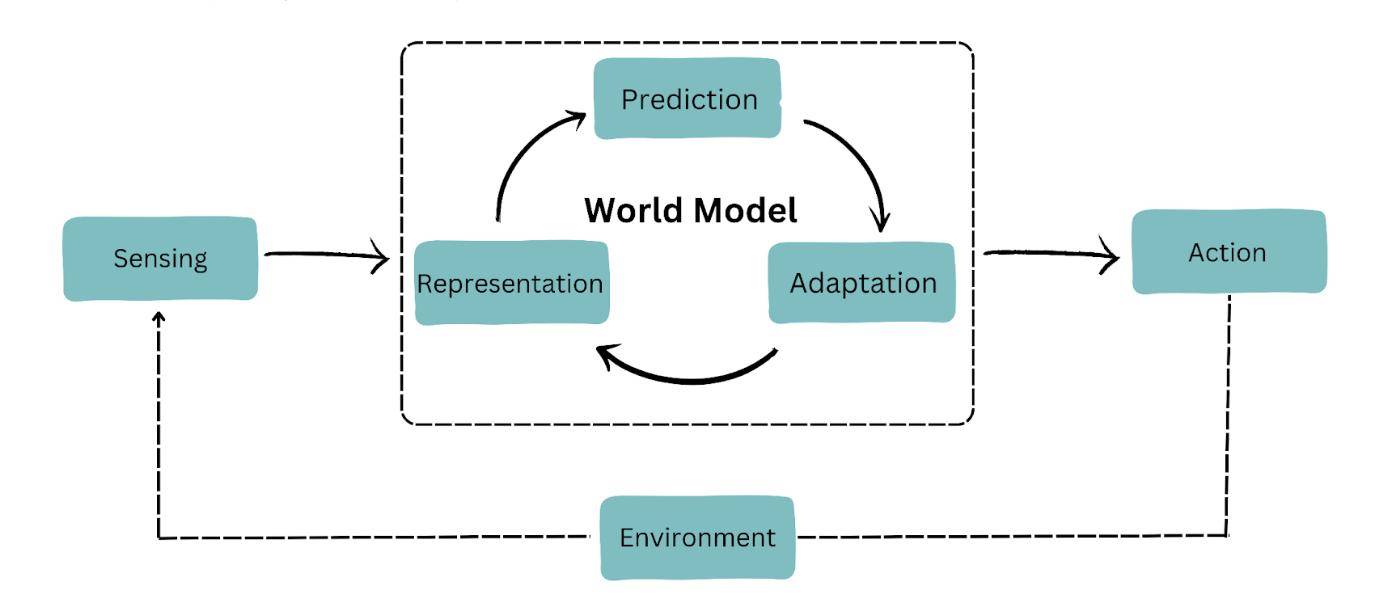
然而,世界模型的发展和应用也面临着诸多挑战。数据的多样性和质量、巨量的计算资源需求以及模型的可解释性等问题都是亟待解决的难题。不过,随着技术的不断进步和完善,相信这些问题都将得到逐步解决。
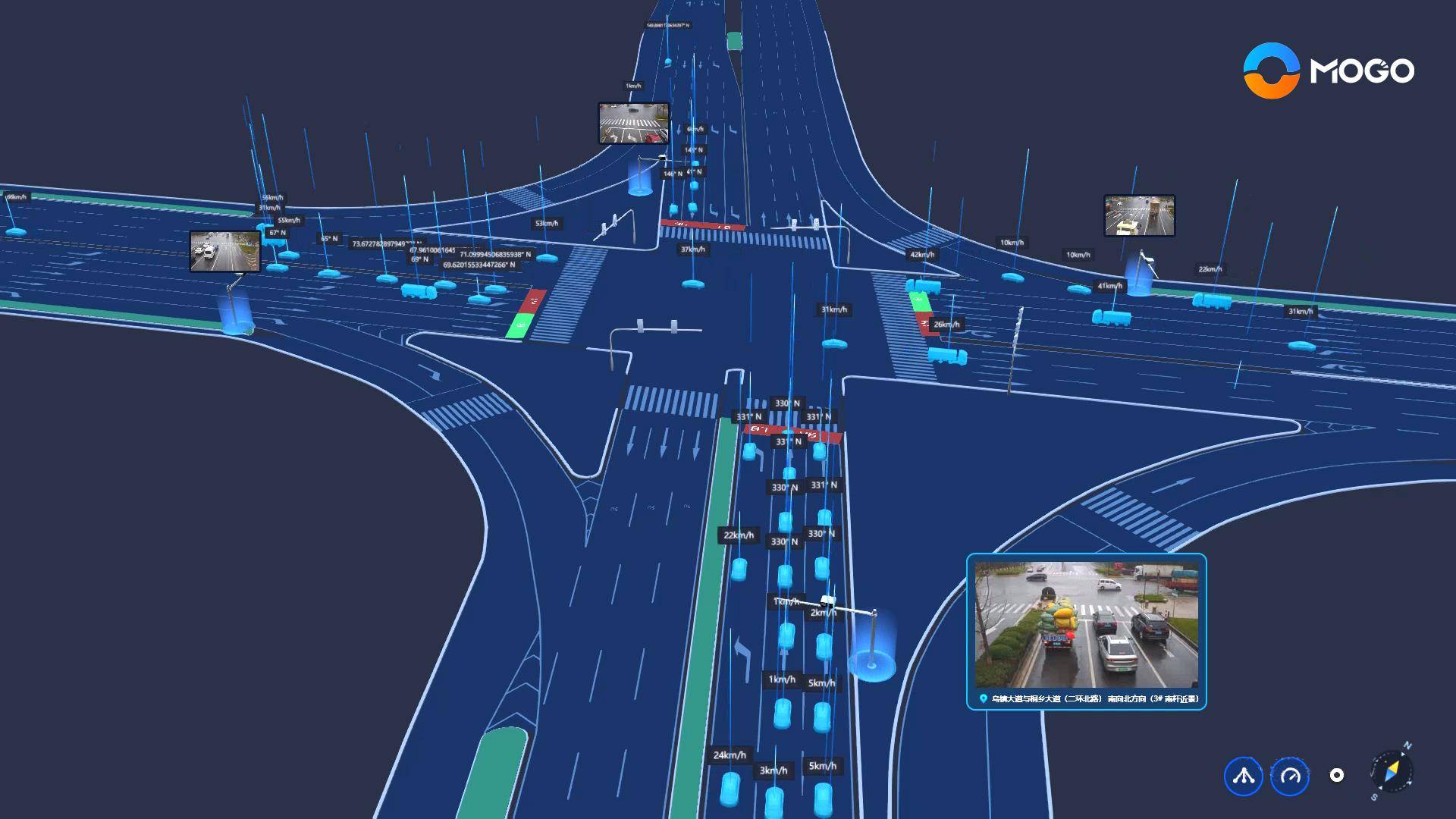
在中国,车路云一体化技术的兴起为自动驾驶领域带来了新的发展方向。这一技术通过集成通信基站、卫星通信和定位、各类传感器、云控平台等基础设施,形成一个信息共享、高效协同的车路云网络。2024年,车路云一体化技术迎来了全面落地的里程碑年份。从南到北、由西至东,全国共有20个城市进入试点名单。车路云一体化技术不仅让车辆融入了更大范围的智能交通生态系统中,还为城市交通管理的智能化升级提供了一条具有实践意义的路径。
在数据分发与共享过程中,保障数据的安全性至关重要。智能车辆所采集的数据涵盖了多种传感器类型和数据源,其中可能涉及敏感信息和个人隐私。因此,在数据采集后,必须根据相关法律法规进行分类分级、降密、脱敏、加密等操作,为车路云数据的共享应用提供安全合规保障。
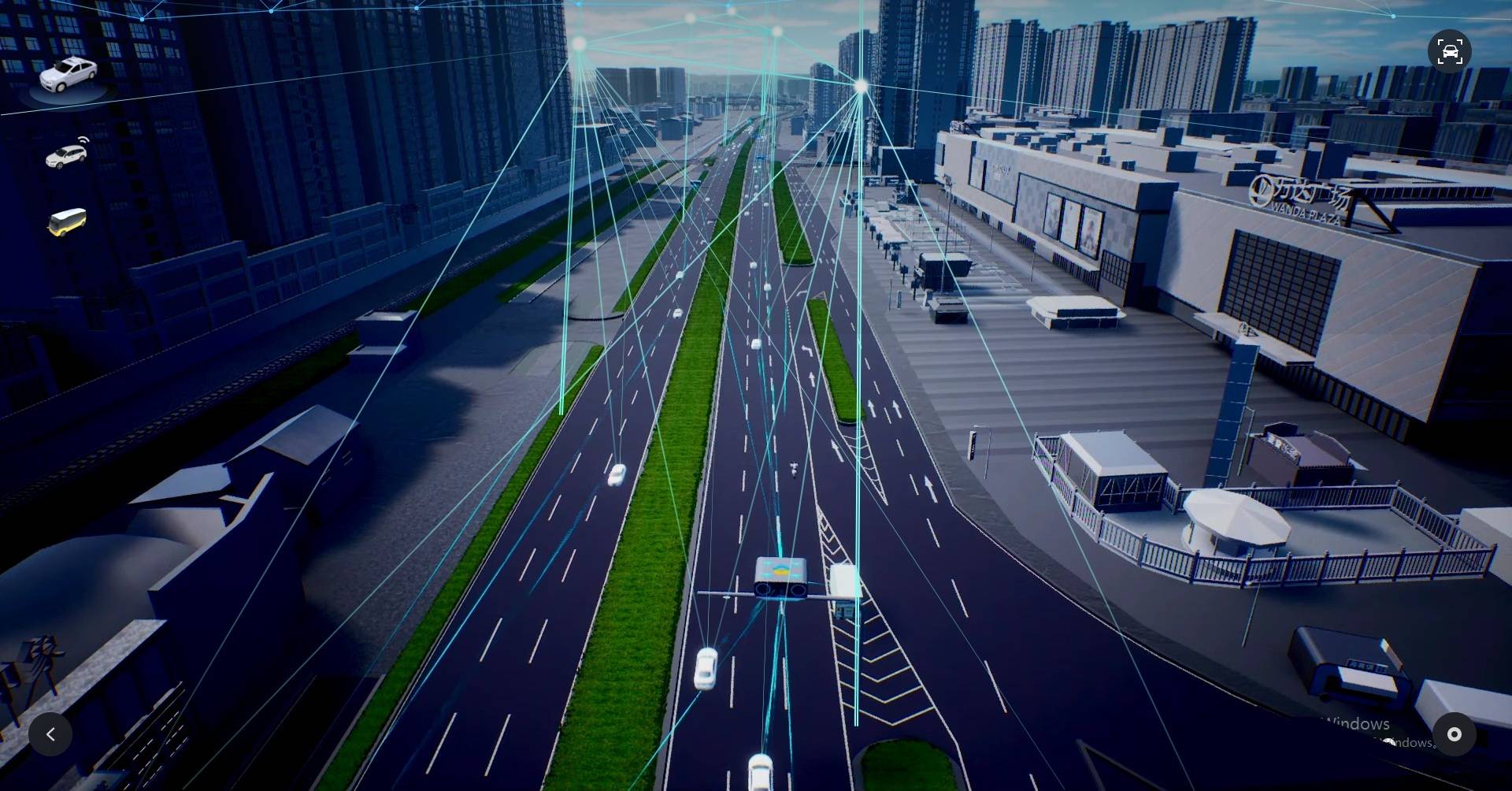
随着技术的不断成熟和完善,车路云网络将助力数字智能社会进入到一个整合系统的新阶段。未来,车路云网络将整合地面网络、低空网络、卫星网络,形成空天地一体化的通感算网络,为智能交通、低空经济、具身智能、AI智能终端等领域提供底层实时数据支持。