在近日举办的2025全球开发者先锋大会“浦江AI生态论坛”上,上海人工智能实验室隆重推出了通用具身智能仿真平台——桃源2.0(GRUtopia2.0),并向全球开发者敞开怀抱。
桃源2.0是在去年7月问世的“城市级”仿真平台桃源1.0的基础上,经过全面升级而来。此次升级主要集中在模块化架构、自动化场景生成以及高效数据采集三大核心技术上。
平台引入了全新的通用模块化仿真框架,这一框架能够支持从导航、操作到运动控制在内的各类具身任务。开发者无需频繁切换平台,仅需通过“三行代码”即可轻松定义任意任务,极大地简化了开发流程。这一创新设计,使得开发者的使用体验得到了显著提升。
在场景资产自动化方面,桃源2.0集成了数量庞大的标准化物体资产,并结合自动化生成和随机化工具,实现了复杂场景的一键生成。这一功能的增强,为开发者提供了更加丰富多样的测试环境。
平台的数据采集系统也进行了全面优化。针对操作任务,桃源2.0提供了多种低门槛的遥操作工具;而在导航方面,则引入了批量化数据采集工具。相较于传统的空间鼠标方式,遥操作效率提升了5倍,而导航任务的数据采集效率更是最高提升了20倍。
上海AI实验室还宣布完成了首次“虚实贯通”技术体系的全闭环验证。在“真实-模拟-真实”(Real-to-Sim-to-Real)的路径下,实验室正加速推动具身智能的自主演进。桃源2.0作为该体系的核心,通过高性能仿真技术,极大地提升了智能体在虚拟环境中的训练效率,并实现了向现实场景的平滑迁移。
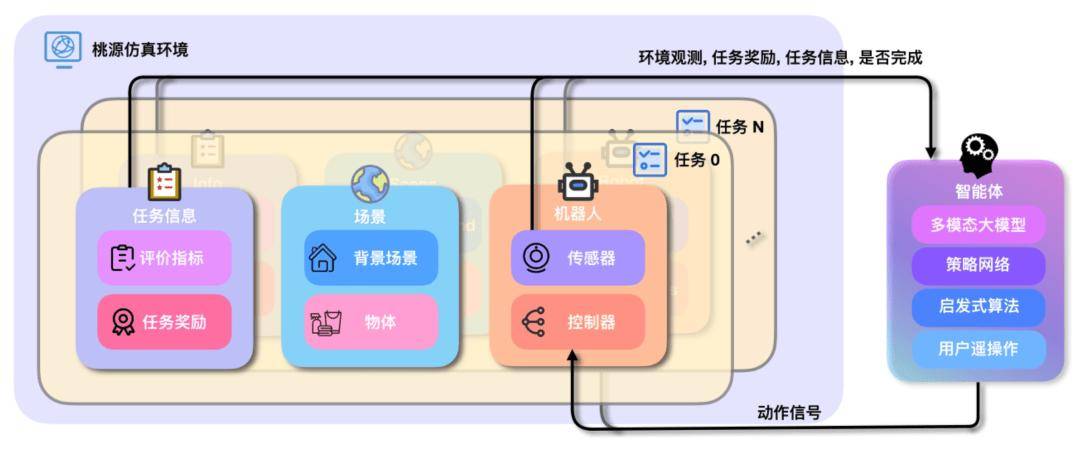
为了满足从底层控制到顶层决策任务的“通用性”训练需求,上海AI实验室的研究团队为桃源2.0设计了功能全面的模块化框架。这一框架具有代码轻量、灵活拓展的特点,能够将训练任务拆解为“场景、机器人、任务指标”三要素。用户仅需通过简单的代码组合,即可实现多种导航、操作和控制任务。
在定制化数据采集方面,桃源2.0同样表现出色。平台提供了高效的数据收集管线,以满足用户对操作、导航等任务的数据采集需求。为了弥补传统遥操作工具在活动范围、距离感知、动作精度等方面的不足,研究人员引入了VR、动作捕捉、双手协调等遥操作手段,极大地提升了模拟数据采集的效率。

特别是在操作数据采集方面,桃源2.0首创了双手协调的“隔空操作模式”。这一模式无需视觉及操作硬件支持,仅通过动作捕捉即可控制机器人的运动、视角转换、坐标系重定位和运动精度调整等功能。相较于传统方式,操作效率提升了5倍,单人一天即可采集上百条复杂操作数据。

在导航数据采集方面,桃源2.0同样表现出色。平台利用全局地图ESDF并行采样合成海量轨迹数据,相较于人工操作传统方式,数据采集效率提升了近20倍。同时,针对轮式、足式及虚拟机器人,平台还提供了默认的路径规划控制器,以实现在GRScenes-100、Matterport3D等场景中的自动化路径跟随和观测、动作数据采集。平台还支持批量化工具进行并行的大规模导航数据采集。